

Intertek’s Rich Byczek on avoiding EVSE-to-vehicle interoperability issues.
Back in January, Plugincars.com published an article by Colby Trudeau – a Honda Fit EV owner, Plug In America volunteer, and electrical engineer at Qualcomm Technologies – that detailed his charging troubles using Ecotality’s Blink charging stations at work.
Trudeau found that after about 20 minutes of charging, the Fit EV would sense a connector overheating issue and disable charging. The issue occurred repeatedly on six out of the seven charging stations that were available to him at work.

An Ecotality representative indicated that there was a communications issue between the vehicle and the charging station, while Honda engineers reported that the car’s sensors were clearly seeing a rise in temperature. In the end, Honda released new control software that limits charging current as the sensors notice an increase in temperature.
Along with advising other EV owners on how to “work around” any potential issues, Trudeau’s article highlighted the importance of recurring EVSE testing and intelligent product design.

Charged talked to EVSE standards guru Rich Byczek, who offered some key interoperability advice to engineers designing charging equipment and new vehicles. Byczek is the global technical lead for electric vehicle and energy storage at Intertek, and has been testing EVSE for a few years.
“I would say at the EVSE-to-vehicle point you’ve got three areas where stacked tolerances can hurt you,” he explained.
Physical
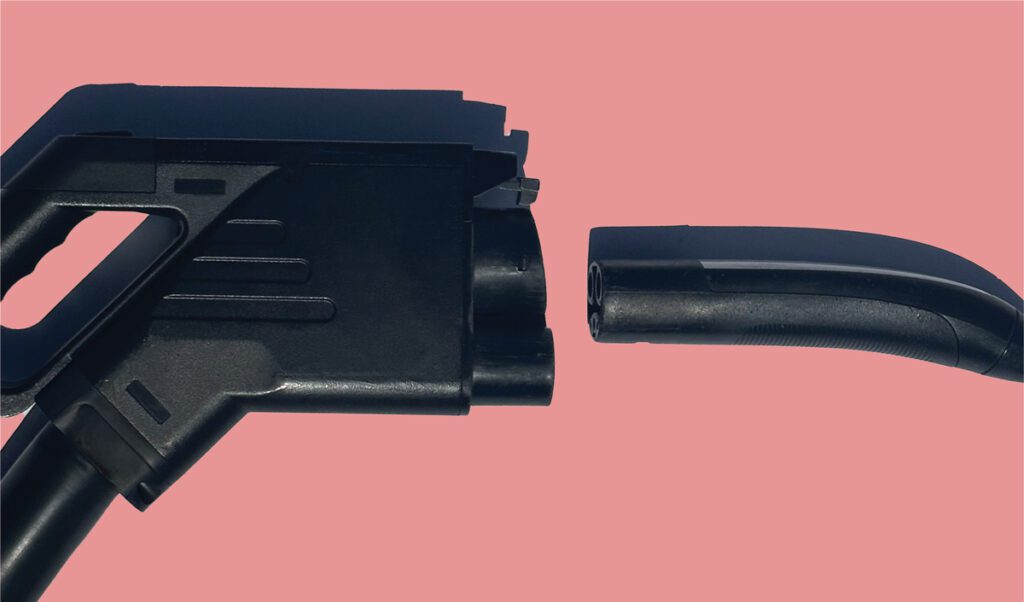
The first area where you could encounter a problem is the most obvious – the physical fit of the EVSE connector to the car. SAE J1772 is the most common North American standard, and it outlines tolerances with an envelope of acceptable critical dimensions.
Seems like a no-brainer, right? Well, Byczek says, “not quite.”
“There are so many different dimensions. There’s terminal length, width, thickness, and angles. If you design the connector at the max of all of those, and the vehicle was at the max of all of those, a stack-up of tolerances in all of them could potentially not allow you to physically connect to the car. We’ve seen this in some cases, but it has gotten better. In the early days, we saw some people trying to design things to the car instead of the standard. We’ve flushed out a lot of it, but with new, smaller manufacturers trying to get into the mix it could still be a potential issue.”
Advice
It ultimately falls on the EVSE maker to design to the consensus standard rather than the vehicle. If they design to the spec, they’ll have minimal problems. Also, Byczek says to stick to the middle of the tolerance range.
“If they’re designing anywhere near the extremes, there is a greater possibility that dimensions will fall out, because you run into the variability of manufacturing. That really comes down to core tooling and manufacturing know-how. And make sure your manufacturing site has done a statistical manufacturing repeatability check, so they have a high confidence in maintaining those tolerances throughout production.”
Protocol
The next area for potential interoperability issues is the general protocol compatibility. “There are some blocking diodes that are used that are just – call it ‘generically defined’ – within SAE J1772,” explains Byczek. “We have seen, through some of our certification work, that varying some of the additional parameters of the diode – parameters that are not clearly defined – can cause voltage shifts, leading to communication problems. Then either the EVSE or the vehicle will not recognize the state of the other, whether it’s ready for charge, not ready for charge, or charge complete.”
The good thing is that the electrical tolerance stack-ups that Byczek has seen, like voltage tolerances or resistance tolerances, have failed safely. “You wouldn’t see an overcharge. Instead, the vehicle won’t accept any charge, or the EVSE will not provide any current.”
Advice
Typically, you’re dealing with parts that are already certified for use in an application. From there, it’s going to take some engineering insight.
“Using high-quality parts would be the simplest way to say it,” explained Byczek. “Again, make sure you’re as close to the middle of the tolerance ranges as possible. Do a tolerance stack-up analysis – the tolerance of the components, the potential shift over temperature range, and any other manufacturing variability that you may add to that circuit design.”
Optimal Charging
The third problematic area is a little harder to define. Basically, are the EVSE and the car always transferring the maximum available power? Meaning that the EVSE properly decodes the ability of the vehicle, and the onboard charger in the vehicle properly decodes the available power from the EVSE. Ideally, the operator wants to have the minimum charging time, and/or the correct delay in charging time for those who are timing their charging events according to utility pricing.
“That’s going to be more difficult to quantify in an interoperability standard without doing some actual field studies to see what the true charging times are and making sure that maximum available power is being transferred,” said Byczek. “OK, my EVSE fits and it does work with the car. Now can I reliably expect that it will be fully charged in the morning?”

For one thing, there is a general software bugging concern which can manifest itself in many different ways. “During the different charging stages, there is a PWM signal that’s varying so that the vehicle knows, for example, if the charging station is providing power at 1.5 kW, or 7 kW, or whatever it may be. A problem with that signal, or interpreting the signal, will change the amount of time it will take to charge the vehicle.”
“You also have a lot of development in place for making multiplex charging stations that will charge multiple vehicles. How does the onboard charger react when the charging station suddenly has less available power? How does that timing take place? Are they always handshaking correctly, so that the onboard charger knows how much power is available at a given time?”
Like all possible interoperability issues, when systems are designed perfectly to the standard, we shouldn’t see problems. However, there are going to be different implementations of new systems like multiplexing and variable power availability on the utility side. How will the actual software timing be implemented in the field?
For example, if a vehicle connects to a charging station at 8 pm and sees that there is 6 kW of available power, but at some point in the night the utility rates change and the charging station drops its available power to 3 kW, does the vehicle automatically recalculate the time needed to fully charge?
Also, in cold or hot weather the vehicle’s forced cooling system may be running while the vehicle is charging, requiring additional power over and above what is needed to charge the battery. The vehicle could also be set to automatically turn on the heater in the morning to utilize the power hungry circuits while it’s plugged in. But will the vehicle really calculate how much time is needed to fully charge when those features are coupled with the timing of charging events based on power availability or utility rates?

“Perhaps this issue is less a true interoperability problem and more a future-proofing problem, but from a user standpoint there’s really not much difference,” said Byczek. “Either the vehicle is fully charged or not when I get up in the morning. I don’t really know or care why.”
Advice
Byczek says that to best avoid these charge-timing issues, both the EVSE and vehicle makers need to consider what the other side is trying to do.

The SAE Hybrid Committee is currently working on a draft standard, SAE J2953, that is essentially a recommended procedure for validating interoperability or compatibility of charging stations and vehicles according to J1772. Similar standards are also underway in the CHAdeMO camp to guide third parties on how to evaluate charging stations’ compatibility with other vehicles.


Issue: MAR/APR 2013