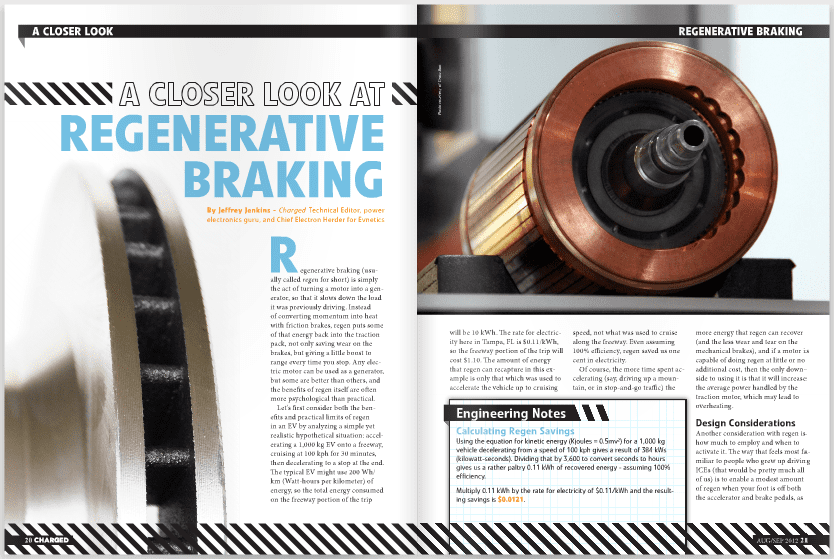
Regenerative braking (usually called regen for short) is simply the act of turning a motor into a generator, so that it slows down the load it was previously driving. Instead of converting momentum into heat with friction brakes, regen puts some of that energy back into the traction pack, not only saving wear on the brakes, but giving a little boost to range every time you stop. Any electric motor can be used as a generator, but some are better than others, and the benefits of regen itself are often more psychological than practical.
Let’s first consider both the benefits and practical limits of regen in an EV by analyzing a simple yet realistic hypothetical situation: accelerating a 1,000 kg EV onto a freeway, cruising at 100 kph for 30 minutes, then decelerating to a stop at the end. The typical EV might use 200 Wh/km (Watt-hours per kilometer) of energy, so the total energy consumed on the freeway portion of the trip will be 10 kWh. The rate for electricity here in Tampa, FL is $0.11/kWh, so the freeway portion of the trip will cost $1.10. The amount of energy that regen can recapture in this example is only that which was used to accelerate the vehicle up to cruising speed, not what was used to cruise along the freeway. Even assuming 100% efficiency, regen saved us one cent in electricity (see calculating regen savings math below).
Of course, the more time spent accelerating (say, driving up a mountain, or in stop-and-go traffic) the more energy that regen can recover (and the less wear and tear on the mechanical brakes), and if a motor is capable of doing regen at little or no additional cost, then the only downside to using it is that it will increase the average power handled by the traction motor, which may lead to overheating.
Engineering Notes
Calculating Regen Savings
Using the equation for kinetic energy (Kjoules = 0.5mv²) for a 1,000 kg vehicle decelerating from a speed of 100 kph gives a result of 384 kWs (kilowatt-seconds). Dividing that by 3,600 to convert seconds to hours gives us a rather paltry 0.11 kWh of recovered energy – assuming 100% efficiency.
Multiply 0.11 kWh by the rate for electricity of $0.11/kWh and the resulting savings is $0.0121.

Design Considerations
Another consideration with regen is how much to employ and when to activate it. The way that feels most familiar to people who grew up driving ICEs (that would be pretty much all of us) is to enable a modest amount of regen when your foot is off both the accelerator and brake pedals, as this feels a lot like engine braking.
However, better overall driving cycle efficiency can often be obtained by learning to coast when both pedals are off, and only enabling regen when the mechanical brakes are applied just enough to light the brake lights, and not much else. The other common approach is to make the braking effort from regen proportional to the pressure of the hydraulic fluid in the mechanical braking system. Even more sophisticated schemes using regen for, e.g., traction control are possible, limited only by the imagination of the software engineers and the tolerance of the company employing them for getting sued when something horribly complex goes horribly wrong.

Motors and Regen
Some motors are better suited to doing regen than others. There are literally hundreds of different types of motors in existence, but only five are commonly used in traction applications: Series DC (Series), Permanent Magnet DC (PMDC), Separately Excited DC (SepEx), PM Synchronous (PMAC, both Interior and Surface PM types), and AC Induction (ACIM).
PMDC and SepEx
The PMDC and SepEx types are both well-suited to regen, but are rarely used by either OEMs or DIYers. The PMDC type is limited, mainly because even the largest of them are only suitable for motorcycles and small sport vehicle applications, while the SepEx motor requires nearly as complex a controller as an AC motor, yet suffers from the same disadvantages of all brushed motors. Namely, the brushes limit the maximum RPM allowed and also produce conductive dust that eventually compromises the isolation between the battery pack and the frame if not cleaned out regularly.
Series
The Series motor, despite being a brushed type, is very popular for light-duty EVs, like golf carts, and with do-it-yourself, low-volume EV builders, mainly because it delivers the most power for the least cost and has the highest peak-to-average power capability of any motor. However, it is generally not even considered for use by OEMs because it cannot operate in reverse or regen without bulky and expensive contactors, and even then it is poorly suited to regen because it is fundamentally unstable as a generator – the more you load down a series generator, the higher its output voltage! This instability is made even worse by the controller, because to enable regen with a series motor the controller has to operate in the voltage boosting mode, which itself is unstable, particularly at high ratios of input to output voltage. The way I often describe a series motor and controller doing regen is stacking two brooms and then balancing them in the palm of your hand. You got to be one helluva magician to pull it off, and even then it’s a lot of work just to balance a couple of brooms. Thus, because the actual benefit of regen is rarely worth more than a few cents per operating cycle, the extra cost to implement it with a series DC motor is not justified.
This is in contrast to the three motors that are most popular with OEMs: Interior and Surface PM Synchronous, and AC Induction. These motors need to be driven by an inverter, which usually employs six controlled switches to synthesize three-phase current from a DC source. An inverter is a considerably more complex (read: expensive) device than the simple buck or buck/boost converter that can be used to control a Series DC motor, but the advantages of these types of AC motors are so compelling to OEMs (if less so to golf cart manufacturers and DIYers) that the cost disadvantage is worth it. At any rate, with a sophisticated enough inverter, along with rotor position feedback from either an encoder or resolver, all three of these types of motors are very well suited to both forward and reverse operation while delivering either positive (motoring) or negative (generating) torque. This is because the magnitude and direction of both rotation and torque are all controlled by software, more or less. Thus switching between forward motoring and forward regenerating is pretty much as simple as commanding a slower rpm.
There are significant differences in behavior and cost between these three types of AC motor, despite the fact that all can use the same controller, and even much of the same control software. The stator on all three motors is pretty much the same; it is the rotor that is different in each of them.
ACIM
The rotor of the ACIM is the simplest and least expensive to construct by a wide margin, because it consists of bars of aluminum (or copper in high efficiency types) embedded in steel laminations. The laminations can be stamped from sheet stock, and the bars can be cast in place. This type of rotor is extremely robust, as evidenced by the 12,000 rpm limit of the ACIM used in the Tesla Roadster. The downside is that the field must be induced in the rotor bars by transformer action (hence the name), which not only robs a percentage point or two of efficiency compared to a similar size PMAC machine, but it also consumes a substantial portion of the current rating of the inverter. The actual percentage of the current rating given over to inducing the field can be calculated from the motor’s cosine Φ specification, but typically anywhere from 50-200 A is required by the induction motor’s field.
PMAC
In contrast, both of the PMAC motors use rare earth magnets to supply the field, and are therefore somewhat easier to control from a software perspective. They also exhibit higher efficiency and better utilization of the power semiconductors in the inverter. The downside is that the rotor is much more difficult and expensive to construct – they aren’t called “rare earth magnets” for nothing! The Surface PMAC motor is the simpler of the two to construct because the magnets are, as the name implies, attached to the surface of the rotor. You don’t need a PhD in engineering to see that this greatly limits the maximum rpm the rotor can tolerate. The magnets are buried in the rotor of the Interior PMAC motor, which significantly enhances its ability to tolerate high rpm, but also results in the highest manufacturing cost. Burying the magnets also gives the Interior PMAC (often just called IPM) motor a wider “Constant Power Speed Range” because the magnets in the rotor can be “pushed” by the phase currents in the stator (resulting in what is called reluctance torque).
The OEMs just love this kind of motor because of the wide speed range, high efficiency and compact size, but my prediction is that it will not reign supreme for long, simply because the ACIM is so much less expensive to build, and history is replete with examples of the less expensive trumping the technologically better (Betamax, anyone?).
This is just a cursory overview of regenerative braking and how it is accomplished with the most common motors used in EVs, but I hope it sheds some light on something which is often cloaked with a shroud of mystery, and invoked with hushed and reverent tones by the newly converted (to electric, that is).
Read more EV Tech Explained articles.
This article originally appeared in Charged AUG/SEP 2012 – Subscriber Here
Photo courtesy of Tinou Bao