

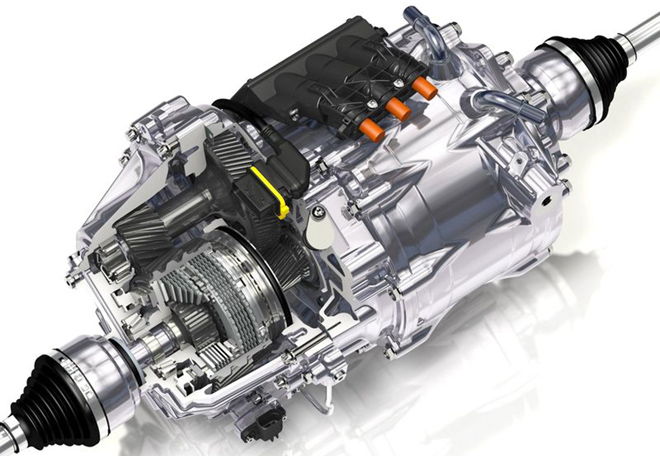
In February, engineering firm GKN Automotive announced a new torque-vectoring option for electric drive called eTwinster. Torque vectoring technology is generally defined as a vehicle’s ability to vary the power to each wheel. To quickly control the torque applied to the wheels independent of one another – increasing stability, responsiveness and agility – GKN’s new concept combines an electric motor with a dual-clutch system.
At first glance, many engineers in the EV industry might look at the description of eTwinster and ask, “Why not use two electric motors on the one axle? Wouldn’t that be simpler?”
Charged recently talked to Theo Gassmann, GKN’s Advanced Engineering Director, during an interview for our latest issue. We asked him to describe how the eTwnister compares to a dual-motor system.
Theo Gassmann: There are some pros and cons to each system. One of the main benefits of using two motors would be that you could apply negative torque to one side and positive torque to the other side – while with one motor in the eTwinster you can either break or drive. So, two motors offer that option for more torque vectoring potential – an additional degree of freedom.
However, there are also many drawbacks to using two motors, including cost, complexity and even performance limitations.
With dual motors there are some disadvantages in traction and torque vectoring functionality, particularly in full acceleration. When you want to apply full power to two smaller motors – one for each wheel – essentially you have no torque vectoring capacity because each motor is at full torque in the forward direction. It’s the same for both wheels.
In contrast, with one larger motor and clutches that are big enough to handle high torque capacity, you could theoretically put 100 percent of the available torque to one wheel, not just 50 percent. With the eTwinster, you have all of the torque available to redistribute it in a way that always keeps the maximum traction and driving performance. During full acceleration you have the ability to redistribute the torque and, for example, put 20 percent to one side and 80 to the other.
This is also important during critical traction situations, with one wheel on ice, for example. If you have two electric motors in this case, one motor is not providing any traction, because it’s just driving the slipping wheel. Again you have a lack of traction performance, because you’re splitting the power, more or less. Without an additional locking feature, you cannot put all the power to one wheel.
There are also cost and weight drawbacks to using two motors. Today, electric motors are still pretty expensive, and having two is significantly more expensive than having one bigger motor, even when you split the power 50/50. Most of the traction motors are high-speed lower-torque machines, so you still need a gear for each motor and in some cases even a disconnect, because the motors are not prepared to cover the entire vehicle speed. You end up with two complete electric drivelines for each wheel, and that adds a significant amount of weight and cost compared to a single-motor configuration.
So, given the technology available today and looking at weight and packaging cost, a single motor is still the preferred configuration, and the Twinster technology is a very reasonable and affordable way to provide additional traction and stability enhancement.
I think in the future, maybe 10 to 20 years from now, direct-drive wheel motors could become a reality. If the technology continues to improve, wheel motors could be a different story in terms of packaging and cost.
SEE ALSO: Q&A with Tesla’s lead motor engineer