

Sponsored by Pickering interfaces
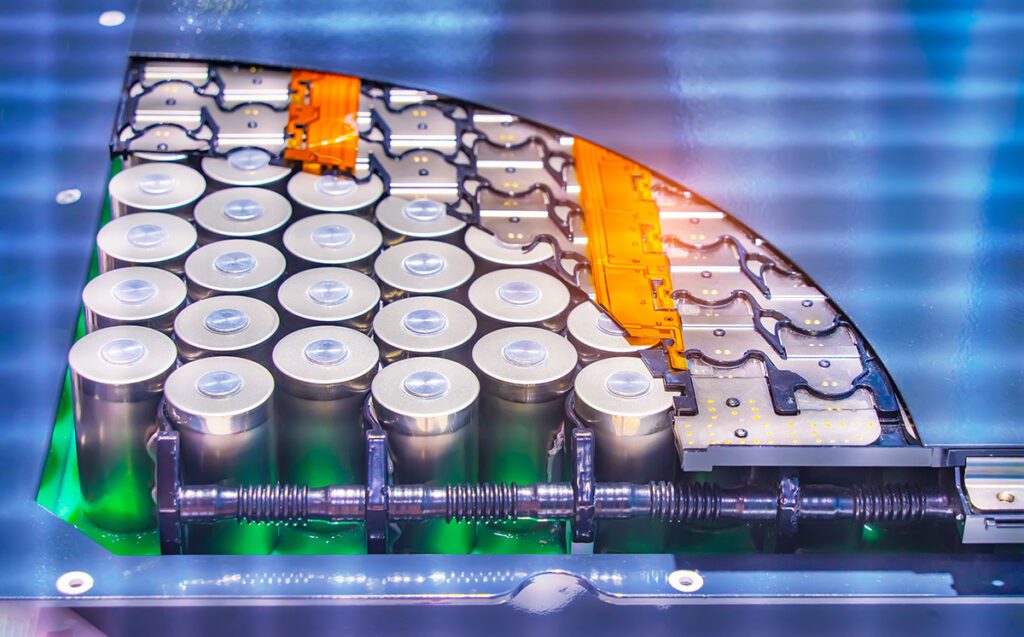
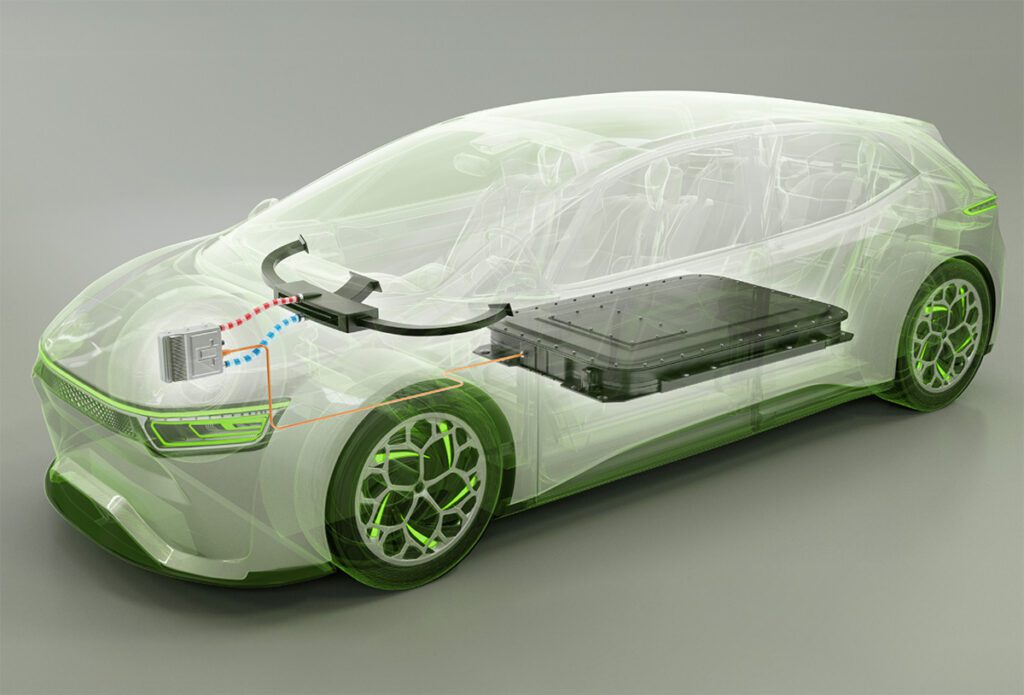
Imagine the challenge. You work for an electric vehicle startup company, designing the Hardware-in-the-Loop Simulation (HILS) test system. Everything is new – the hardware, the software, the tools, the testers and the test code. Yet, the system must be as accurate as possible to simulate the operating environment correctly. You’re also working on the electronic control unit (ECU), which houses the EV batteries. To test them thoroughly, they will need to be stressed beyond their normal operating range. Since the test environment can be quite dangerous – you will need a blast-proof bunker.
To summarize, it’s a very dynamic situation with a high degree of risk. Because the company is a startup, there is a very aggressive schedule without the established product roadmap, which would enable you to predict test system requirements accurately for two to three years ahead. You’ve got maybe six months’ visibility. You’re going to need a very flexible and scalable system.
In this white paper, we discuss how an electric vehicle startup company used a flexible HILS system comprised of signal switching and sensor simulation to design a software test system for battery ECUs.